
A Quadcopter at Your Service-108 with Secure Delivery of Medicine
DOI:
https://doi.org/10.26438/ijcse/v11i12.915Keywords:
Unmanned aerial vehicle, ArduPilot, MAV, Mission Planne, RFID, UID, GPSAbstract
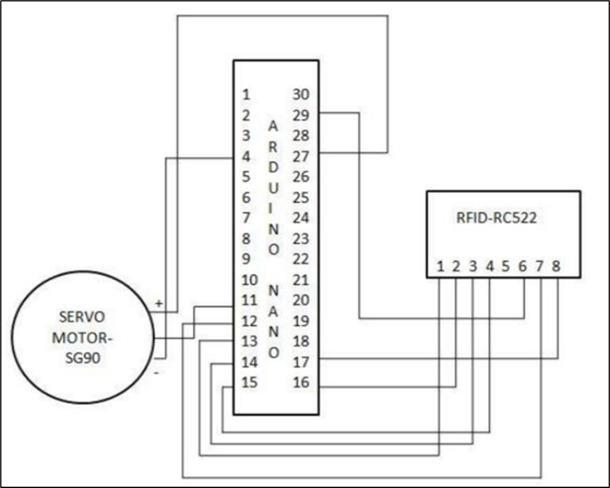
Revolutionizing supply chain dynamics, medicine-carrying drones facilitate a stable vertical flight for seamless supply transfers to remote areas. Empowered by Ardupilot, an open-source Unmanned Vehicle Autopilot software suite, these drones showcase advanced flight control capabilities. GPS ensures precise navigation, while Mission Planner, intricately connected with MAVLink, optimizes quadcopter operations. The RFID-Arduino Nano interface secures the container housing medical resources. Post-compilation, the code dynamically runs, extracting RFID card serial numbers for heightened security. Exclusive access is granted solely to cards with designated UIDs, fortifying overall mission security and reliability. This abstract encapsulates a technological nexus, converging advanced flight systems and robust security measures, propelling medicine delivery to new frontiers with efficiency and precision.
References
[1] Andrew S. Hardy and Mohammed T. Rajeh "Design of the Life-ring Drone Delivery System for Rip Current Rescue” Systems and Information Engineering Design Symposium (SIEDS) Conference, 2016.
[2] Xiaoli Wang and Aakanksha Chowdhery "Networked Drone Cameras for Sports Streaming," IEEE International Conference, 2017.
[3] Brad Hyeong-Yun Lee and James R. Morrison "Multi-UAV Control Testbed for Persistent UAV Presence: ROS GPS Waypoint Tracking Package and Centralized Task Allocation Capability," 2017. International Conference on Unmanned Aircraft Systems (ICUAS)
[4] M. S. Minu and R. Aroul Canessane “Secure image transmission scheme in unmanned aerial vehicles using multiple share creation with optimal elliptic curve cryptography” Indian Journal of Computer Science and Engineering (IJCSE), Vol.12, 2021.
[5] Rajagopal A, Nirmala. V “Autonomous Self-evolution of AI on drones: Transfer Learning of Neural Architecture Search’s brain” Vol.7, Issues.6, 2019.
[6] Revathi K, Tamilselvi T “A Smart Drone for Ensuring Precision Agriculture with Artificial Neural Network” Vol.13, 2022.
[7] U.S. Department of Transportation, “Traffic Detector Handbook”. Hostettler R, Birk W., Nordenvaad L. M. Third Edition –Vol.1, chapter 2, pp.1–5. 22, 2006.
[8] Alexander Kleiner “Evaluation of Reactive Obstacle Avoidance Algorithms for a Quadcopter” 14th International Conference on Control, Automation, Robotics & Vision Phuket, Thailand, 13-15th November 2016, ICARCV, 2016.
[9] Martin L. Hazelton, “Estimating Vehicle Speed from Trac Count and Occupancy Data”, Journal of Data Science 2, pp.231-244, 2004.
[10] International Telecommunications Union, "Characteristics of Unmanned Aircraft Systems and Spectrum Requirements to Support their Safe Operation in Non-Segregated Airspace," ITU-R M.2171, December 2009.
[11] US Dept. of Transportation, "Unmanned Aircraft System (UAS) Service Demand 2015-2035: Literature Review and Projections of Future Usage," Technical Report, v.1.0, DOT-VNTSC-DOD-13-01, February 2014.
[12] Hideaki Okazaki, Kaito Isogai “Modelling and Simulation of Motion of a Quadcopter in a Light Wind” IEEE 59th International Midwest Symposium on Circuits and Systems (MWSCAS), Abu Dhabi, UAE, October, pp.16-19, 2016.
Downloads
Published
How to Cite
Issue
Section
License

This work is licensed under a Creative Commons Attribution 4.0 International License.
Authors contributing to this journal agree to publish their articles under the Creative Commons Attribution 4.0 International License, allowing third parties to share their work (copy, distribute, transmit) and to adapt it, under the condition that the authors are given credit and that in the event of reuse or distribution, the terms of this license are made clear.

